国立大学法人東海国立大学機構
革新的な触覚インターフェイス技術
愛知県名古屋市千種区不老町1番
登録情報の修正申請国立大学法人東海国立大学機構
革新的な触覚インターフェイス技術
愛知県名古屋市千種区不老町1番
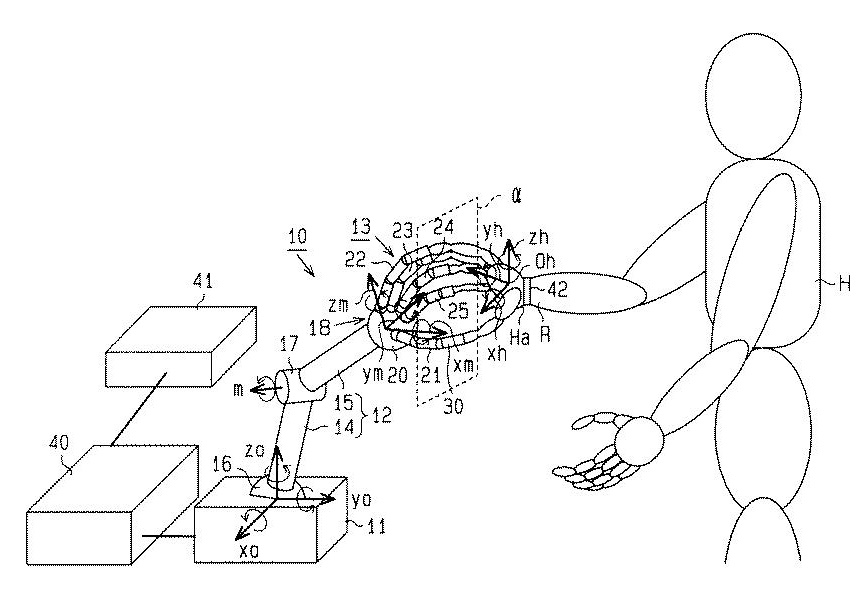
登録情報の修正申請本発明は、操作者の指先の運動に追従する複数の触覚指を持つ触覚インターフェイス技術に関するものです。この技術は、触覚指の動きを正確に制御し、操作者にリアルな触感フィードバックを提供するために、力誤差に基づいた制御アルゴリズムを使用します。応用として、医療用ロボット、バーチャルリアリティ、リモート操作技術などに利用可能です。
つまりは、操作の感覚をフィードバックし、没入感を高める新触覚インターフェイス技術
AIによる特許活用案
おすすめ触覚 インターフェイス フィードバック
- バーチャルリアリティ技術への応用
- 医療用ロボットへの応用
- リモート操作技術での利用
触覚フィードバック技術を活用し、バーチャルリアリティの没入感を向上させるためのインターフェイス技術。
手術ロボットやリハビリテーション機器に触覚フィードバックを提供し、より精密な操作を実現する技術。
遠隔操作ロボットの触覚インターフェイスに適用し、操作者にリアルタイムで触感を伝える技術。
活用条件
- サブスク
- 譲渡
- ライセンス
商品化・サービス化 | ASK 実証実験 | ASK サンプル・プロトタイプ | ASK
特許評価書
- 権利概要
| 出願番号 | 特願2003-030023 |
| 発明の名称 | 触覚インターフェイス及びその制御方法 |
| 出願人/権利者 | 国立大学法人東海国立大学機構 |
| 住所 | 愛知県名古屋市千種区不老町1番 |
| 公開番号 | 特開2003-300188 |
| 登録番号 | 特許第3843319号 |
- サブスク
- 譲渡
- ライセンス
準備中です