国立大学法人東海国立大学機構
精密かつ効率的なロボットハンド制御技術
愛知県名古屋市千種区不老町1番
登録情報の修正申請国立大学法人東海国立大学機構
精密かつ効率的なロボットハンド制御技術
愛知県名古屋市千種区不老町1番
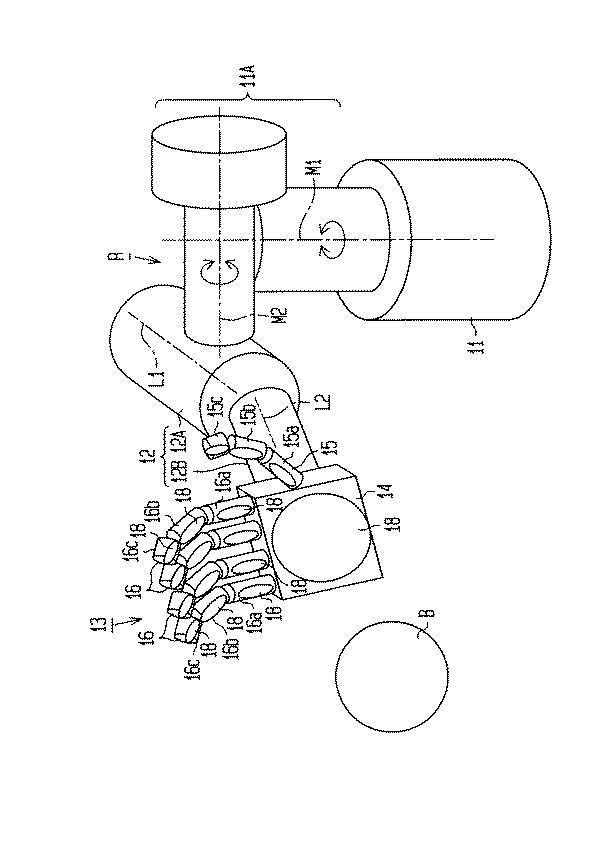
登録情報の修正申請本発明は、複数の能動関節を持つロボットハンドの握り込み制御方法に関するものです。特に、物体に対する接触力や位置を精密に制御する技術により、効率的で柔軟なロボット制御が可能となります。産業用ロボットや精密機器の操作において重要な役割を果たします。
つまりは、複数の関節を利用したロボットハンドの革新的制御方法
AIによる特許活用案
おすすめロボット制御 精密機器 産業ロボット
- 産業用ロボットの精密作業
- 医療分野での応用
- 自動車産業での活用
ロボットハンドの精密な握り込み制御により、工場での精密作業や組立作業の効率を向上させる技術。
ロボットハンドを手術ロボットに導入し、精密な手術やデリケートな操作を支援する技術。
ロボットハンドを自動車製造ラインに導入し、組立や部品取り付けの効率を向上させる技術。
活用条件
- サブスク
- 譲渡
- ライセンス
商品化・サービス化 | ASK 実証実験 | ASK サンプル・プロトタイプ | ASK
特許評価書
- 権利概要
| 出願番号 | 特願2002-048233 |
| 発明の名称 | ロボットハンド及びロボットハンドの握り込み制御方法 |
| 出願人/権利者 | 国立大学法人東海国立大学機構 |
| 住所 | 愛知県名古屋市千種区不老町1番 |
| 公開番号 | 特開2003-245883 |
| 登録番号 | 特許第3742876号 |
- サブスク
- 譲渡
- ライセンス
準備中です