国立大学法人東海国立大学機構
脚を有する機械の姿勢制御技術
岐阜県
登録情報の修正申請国立大学法人東海国立大学機構
脚を有する機械の姿勢制御技術
岐阜県
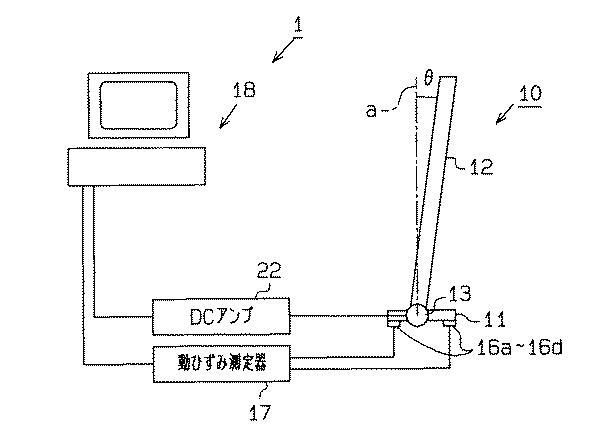
登録情報の修正申請本発明は、脚を有する機械において、接地部材に対する床反力を検出し、脚の傾きや角速度に基づいて駆動手段を制御する姿勢制御装置に関するものである。これにより、外力が加わった際の角度や反力の差を制御し、高精度な姿勢制御を実現します。
つまりは、高精度な姿勢制御を実現
AIによる特許活用案
おすすめ機械工学 姿勢制御 ロボット工学
- 精密な脚の制御技術
- 障害物回避機能の向上
- 医療ロボットへの応用
この技術は、脚を有する機械の精密な姿勢制御を可能にし、外部環境への適応能力を向上させます。
機械が周囲の障害物を認識し、動的に姿勢を調整することで安全性を高めます。
この姿勢制御技術は、リハビリテーションや補助機器として医療ロボットに応用可能です。
活用条件
- サブスク
- 譲渡
- ライセンス
商品化・サービス化 実証実験 サンプル・プロトタイプ
特許評価書
- 権利概要
| 出願番号 | 特願2001-271863 |
| 発明の名称 | 脚を有する機械の姿勢制御装置及び制御方法 |
| 出願人/権利者 | 国立大学法人東海国立大学機構 |
| 住所 | 岐阜県 |
| 公開番号 | 特開2003-080478 |
| 登録番号 | 特許第3637387号 |
- サブスク
- 譲渡
- ライセンス
準備中です